1. 完成
やっとのことでロボットアームが完成しました。今回のバージョンは移動とタップを行うことができます。とりあえず、スマホやタブレットである程度の連続動作テストを実施することが可能になりました。
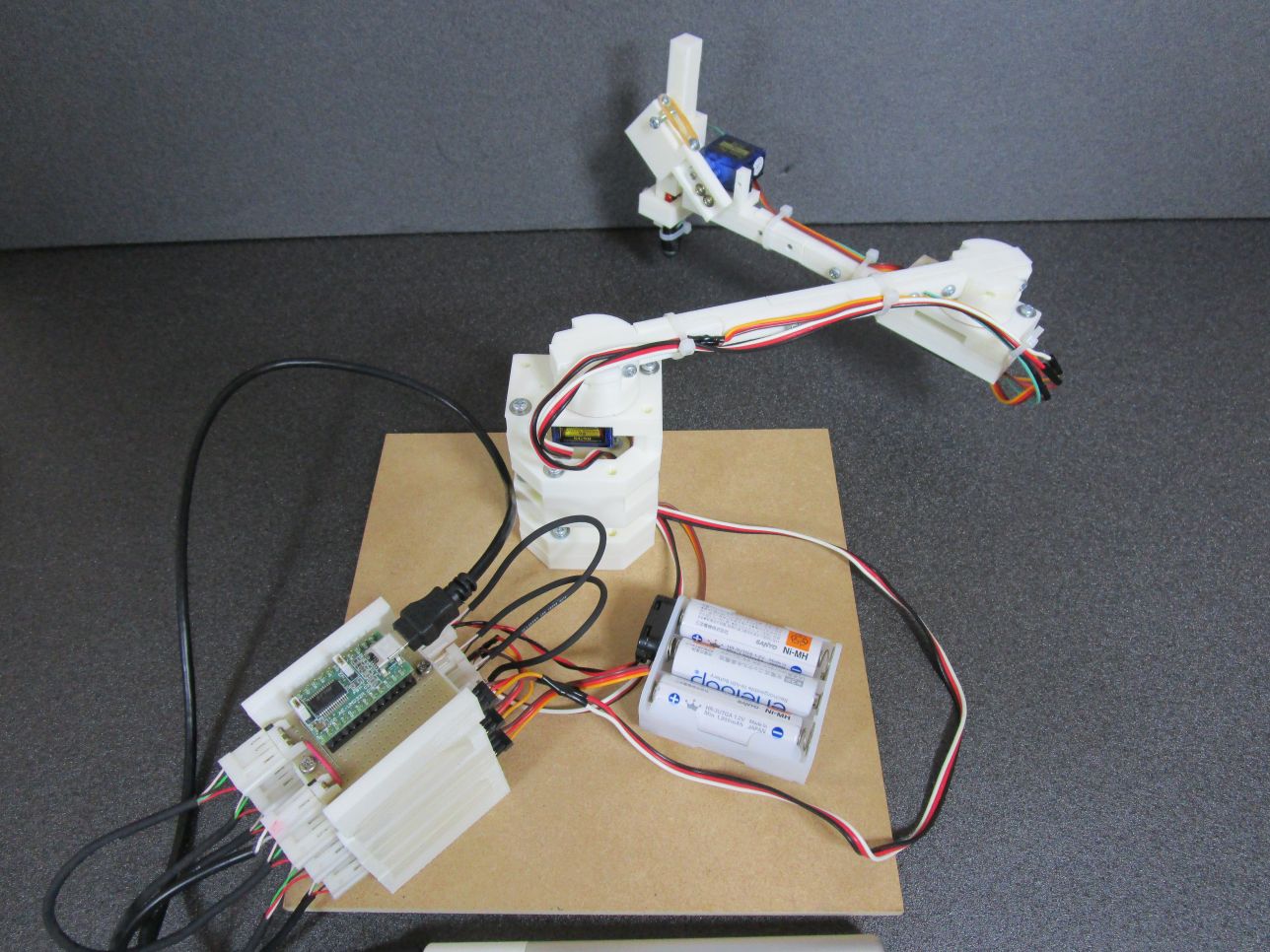
1.1 ロボットアーム Ver.1 タイプD
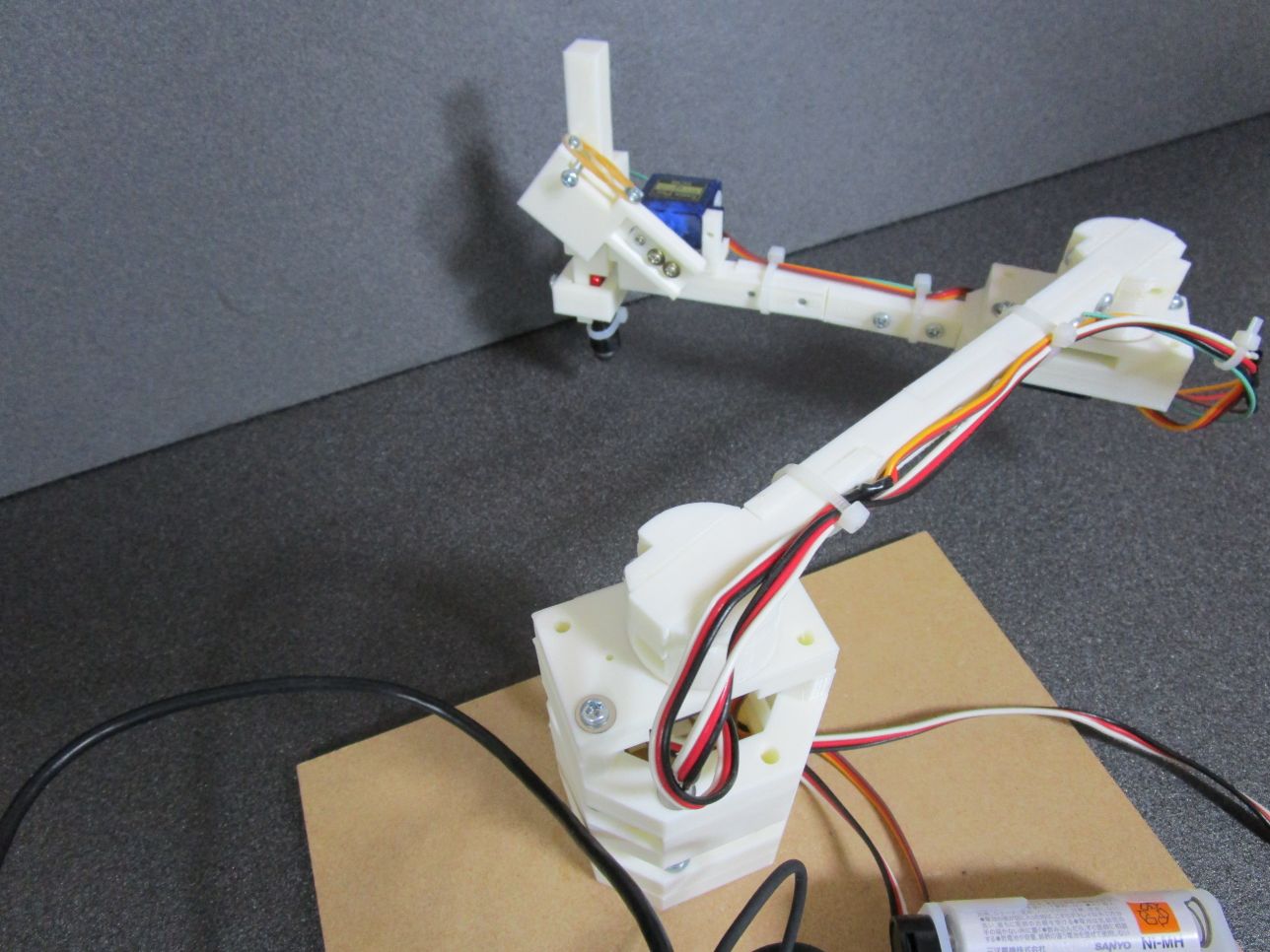
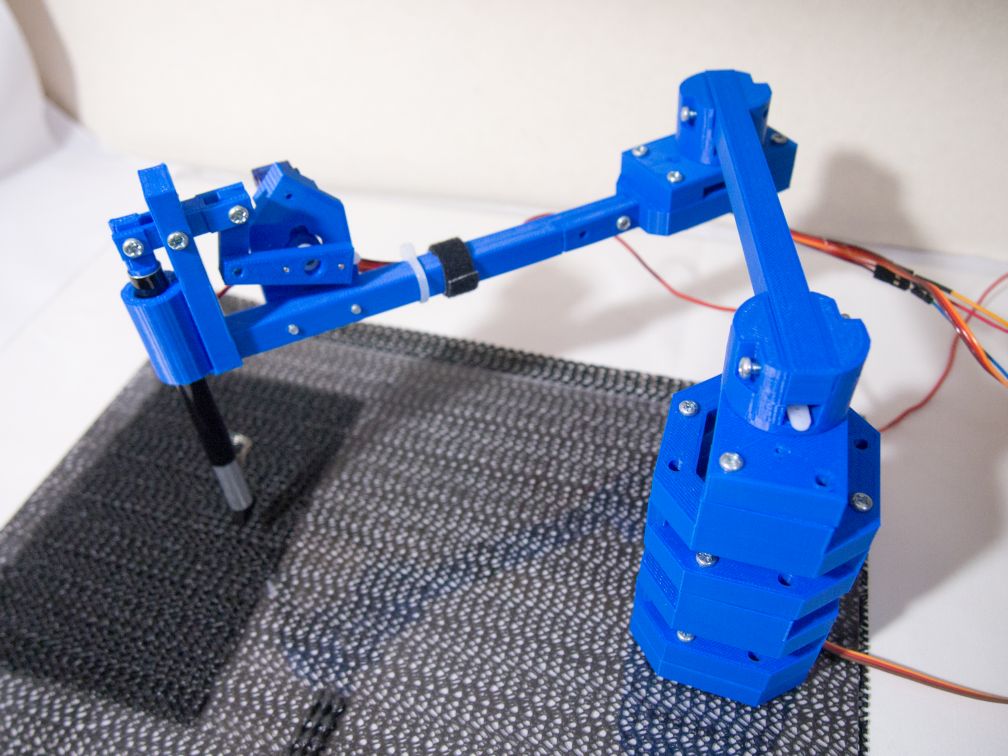
1.2 ロボットアーム Ver.1 タイプY
2. 動作動画
完成したロボットアームの動画です。
テストに使用しているアプリは「タップ de ドカン」です。
2.1 ロボットアーム Ver.1 タイプD の動画
2.2 ロボットアーム Ver.1 タイプY の動画
2.3 ロボットアーム Ver.1 タイプY を使用したアプリのテスト動画
作成したロボットアームを使用して、自作のスマホアプリをテストした動画です。
テストに使用しているアプリは「P-Timer」です。
3. 簡単に費用
作成したロボットアームはかなり安くできたと思います。ラジコンサーボ3個、PIC3個、タッチペン、各種ケーブルや基板、ネジなどを合わせると大体2500円くらいです。mbedやArduinoのような高価なマイコンを使用すると、それだけで2000円から3000円くらいの金額になってしまいます。安価なPICを使用することで安く作ることができました。
3Dプリンタで出力したABS樹脂および電気代については計算を行うのが難しいので何とも言えませんが、1000円はかかっていないと思います。ロボットアーム自体は大体3500円くらいで完成したことになります。電源、USBーシリアル変換器、PIC書き込み機などは入れていません。
4. 課題・問題点
4.1 電源を入れた直後の動作
電源を入れた直後の現在位置がわからないため、最初の1回目の移動時、最高速で動いてしまう。ただ、対応するためにはエンコーダまたは接触スイッチなどをつけるしかないため難しい。今のところ終了時にニュートラル位置に戻し、電源投入後、1度ニュートラル位置へ移動させるという方法で対応している。
4.2 PCとPIC間での通信異常時
PCからPICへ指示を出した際、送信ミスや応答遅れなどが発生することがある。通信異常が発生することは通信速度を遅くすることである程度減らすことは出来ると考えられる。しかしそれでも通信異常は発生する。
現在、PICへの指示は、PICのID1から順に送信を行い、途中異常が発生した場合、その場で再送信ではなく、次の順番の時に送信するようにしている。これは1つのPICへの送信に固執すると、他のPICへの指示が遅れてしまうためです。
通常動作時、多少指示が遅れても問題は特にありません。しかし、将来行う予定のスワイプ(横への直線移動など)に対応すると問題になりそうです。指示が遅れ、動作が遅れてしまうとかくかくとした動きになることが予想されます。
対策は、1つのPICで2個のサーボを制御する。または、通信バッファ代わりのPICを入れて、そこからラジコンサーボユニットへの指示を出す。
とりあえず、今のままスワイプの対応を行い、問題があるようであれば、上記いずれかの対応を行いたいと考えています。
4.3 起動直後のタッチユニット
起動直後、タッチユニットの位置を上にしておかないと、移動した際、スマホやタブレットに引っかかってしまう。単純に起動直後に上に移動するようにすればいいだけだと思います。
4.4 精度について
精度については現在何も調べていません。繰り返し動作時、大体同じ位置になっているようです。iPadやiPad miniのようなタブレットであれば今のところ問題なさそうなのですが、スマホなどのように小さくなった場合、どれだけの操作が行えるのか少し心配なところです。
5. あとがき
PCからの指示で、指定した場所へ移動しタップするロボットアームが完成しました。3次元動作のロボットアームとは違い、複雑な計算も必要なく比較的簡単にできました。売っている物を買うと数万円するところ、数千円で完成したのも驚きでした。まあ、安くできたのも強度や保証などを考えると当然と言えば当然ですが。
PC、マイコンおよび3Dプリンタがあれば色々なロボットを簡単に作れることがわかりました。今回、1番便利だと思ったのは、3Dプリンタです。家にいながら複雑な造形物を簡単に作れる3Dプリンタは本当に便利だと思います。ちなみに、今回3Dプリンタで出力した物について、加工(削る、穴あけなど)は一切行っていません。
<更新履歴>
| 版 | 更新日 | 説明 |
| 新規作成 | 2015年10月5日 | 新規作成 |