移動をスムーズに行えるようになったので、最後のタップ部分を作成したいと思います。
1. タッチペンの加工
今回入手したタッチペンは、人間が持って使うように作られています。なので、ロボットアームに取り付けて使用すると何も反応しません。静電容量方式のタッチパネルの場合(スマホやタブレット、iPhoneやiPadなど)、人間が画面を触った際の静電容量の変化を求めて反応しています。タッチペンは人間の指を延長した物と同じイメージになります。
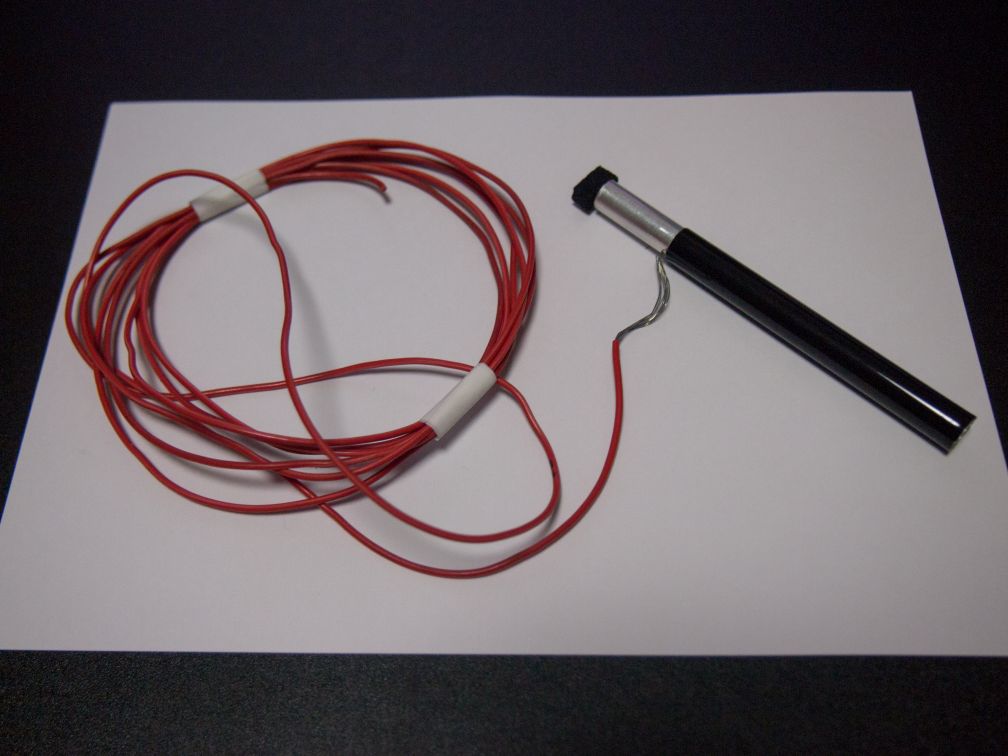
人間がタッチペンを持っていないと静電容量の変化が発生しないため、スマホやタブレットは何も反応してくれません。そこで、タッチペンだけでも変化が起こるように改造します。方法はいたって簡単でタッチペンに長めのケーブルをつけるだけです。ケーブルの被覆を剥いてタッチペンに着け、残った部分は適当にまとめておきます。
2. ここでまたトラブル発生!!
ロボットアームに取り付ける前にはきちんと反応していたタッチペンがなぜか反応しません(ちゃんと手で持たずにテストしましたよ)。なぜ反応しないか調べるのに苦労しましたが、理由は意外と簡単なものでした。それは・・・ロボットアームがタッチペンをしっかりと押し付けられていないこと。テスト時はしっかりと押し付けていたので反応していたのですが、ロボットアームの場合、押しつけが甘かったのです。ロボットアームがタッチペンを押すと、ロボットアーム全体がひずんでしまい力が逃げていました。どうやらタッチペンをそれなりの力で押し付ける必要があるようです。
とはいえ各パーツがひずまないように強度を上げると、重くなりすぎてしまいます。また、押す力が強くなりすぎると画面を気づつけてしまう可能性もあります。そこでタッチペンを軽く触っても反応するように改造することにしました。
3. ふたたびタッチペンの加工
購入していたタッチペンのペン先が少し硬いのが原因のようなので、柔らかいものか、変形する必要が無いものに取り換える必要があります。そこでいろいろ調べたところ、「サンワサプライ 導電スポンジ TK-P2 」なるものを発見しました。
ペン先を導電スポンジに変え、接触面積を多少大きめにするとロボットアームに取り付けても反応するようになりました。またタッチペンの表面は絶縁されているのか抵抗が大きかったので、アルミのパイプを利用しました。
色は違いますが元のタッチペン

無残に切断され、加工されたタッチペン。すでに原形をとどめていない・・・というかパイプだけ。

完成したタッチペンです。ケーブルをつなげることで人間が持っていなくても反応します。
4. PIC担当者のロボットアームの場合
白色のロボットアームを作成しているPIC担当者のロボットアームでは、タップは問題なくできたようです。理由は簡単、しっかり押し込むように作成したからです。

軽く触るだけで反応させたい、しっかり押し込んで反応させる、それぞれの違いで2種類の構造が出来上がりました。
<更新履歴>
| 版 | 更新日 | 説明 |
| 新規作成 | 2015年10月3日 | 新規作成 |