ロボットアームのパーツを3Dプリンタで作成します。デザインにはShadeを使用しています。
1. 台座
ロボットアームの台座を作成します。Shadeで作成したデータを3Dプリンタで出力します。
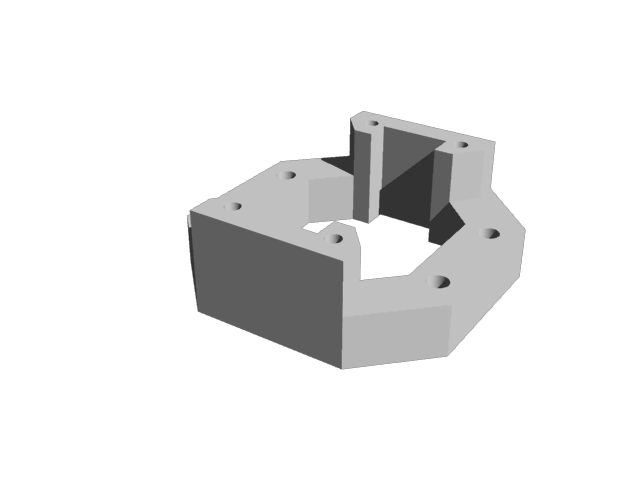
同じパーツ3個と1番下のパーツを出力しました。

組み立てると以下のような感じになります。この上に最初のラジコンサーボを取り付けます。

2. サーボユニット
台座とアームにラジコンサーボを取り付けるパーツを作成します。
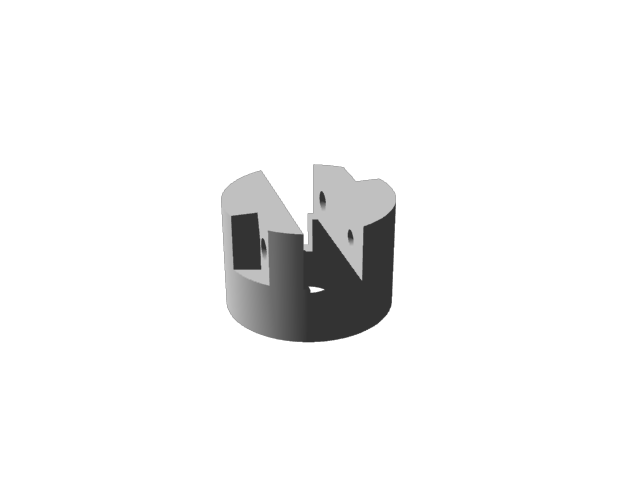

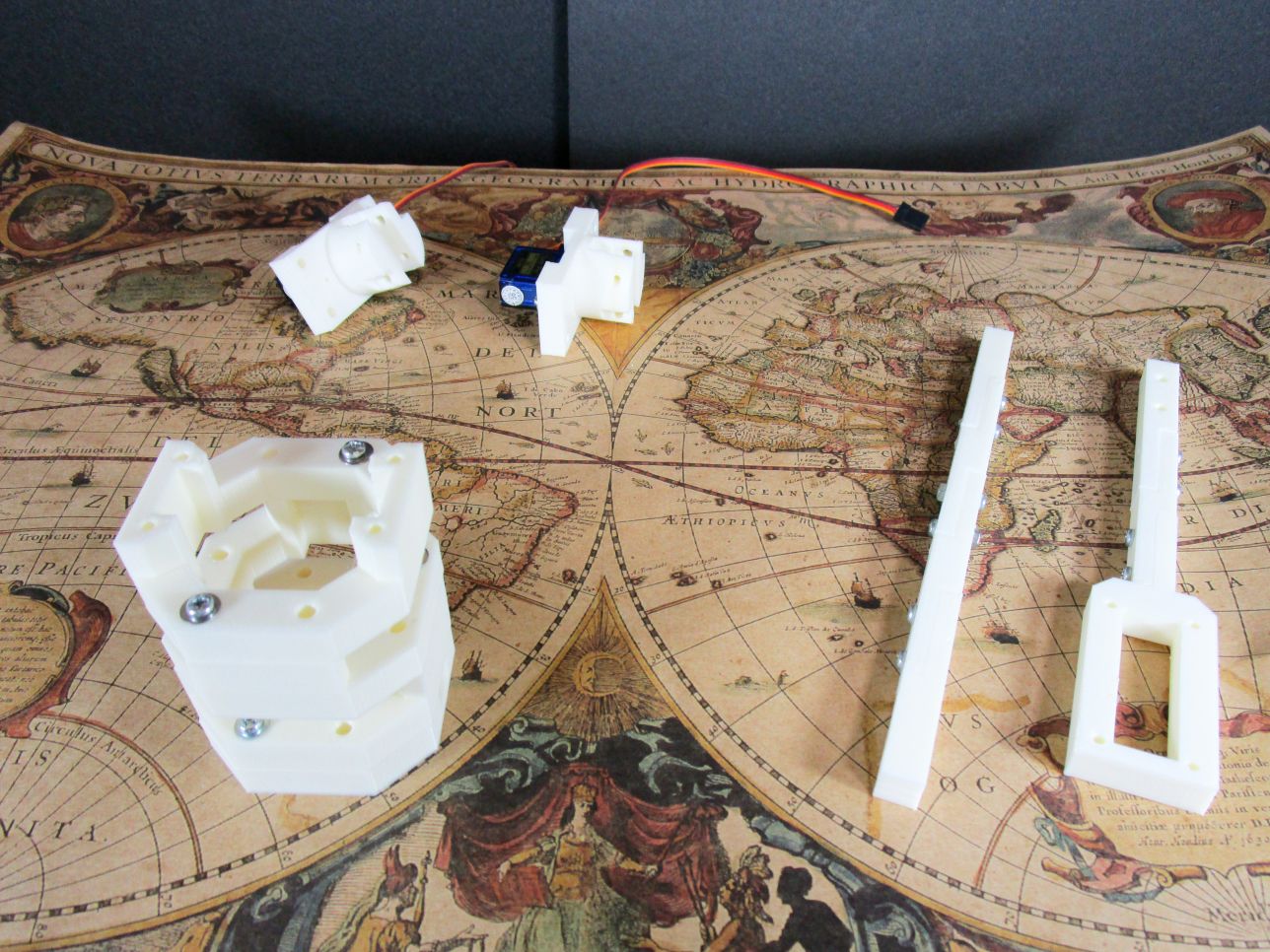
3Dプリンタで出力したパーツとラジコンサーボです。
組み立てると以下のような感じになります。円形のパーツにホーンを取り付けてラジコンサーボに固定します。

3. アーム
アームを作成します。3Dプリンタの出力スペースと、汎用性を考え細かいパーツに分けました。
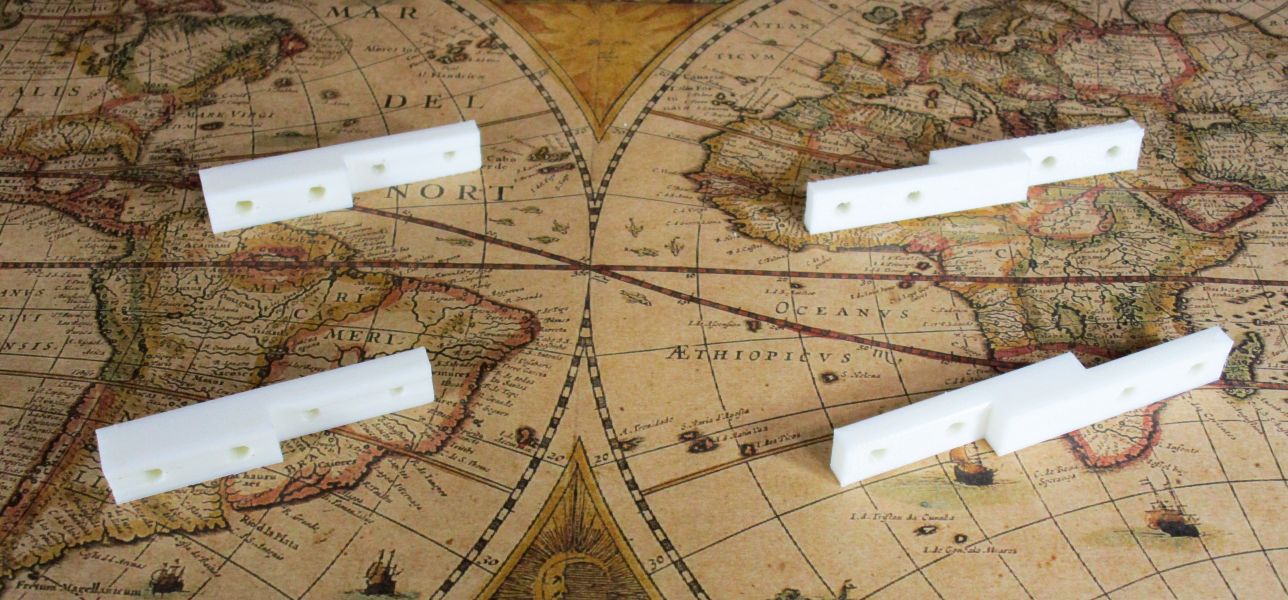
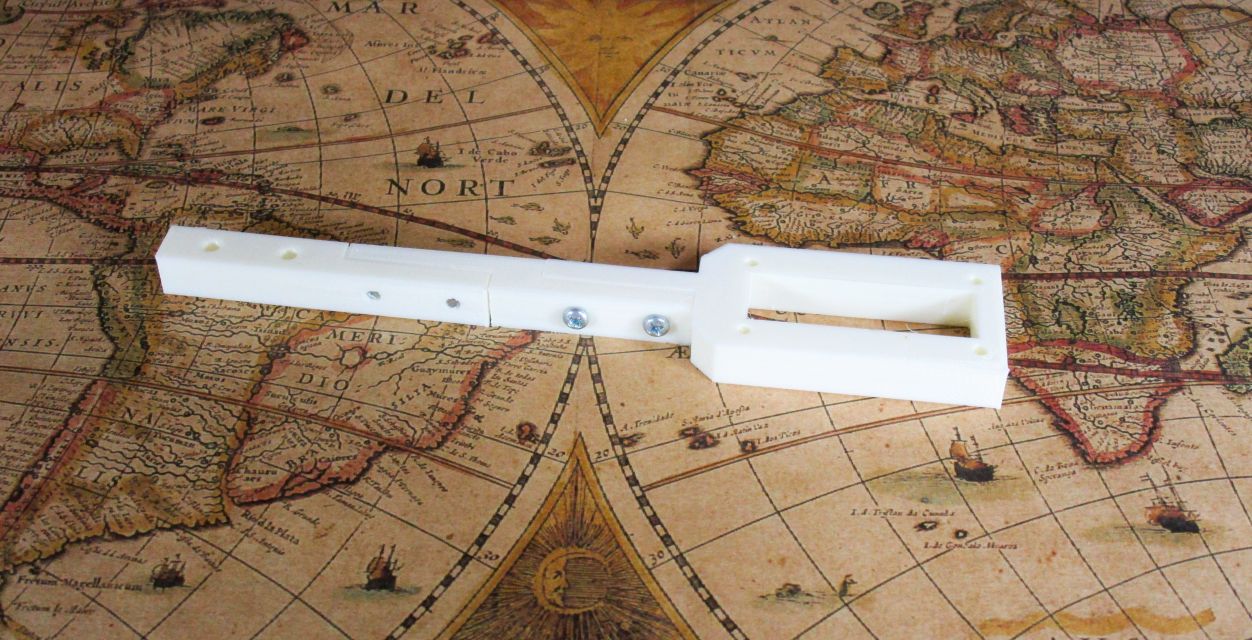
組み立てると以下のような感じになります。

2個目のラジコンサーボを取り付ける関節部分のアームパーツです。

右側にラジコンサーボをセットします。
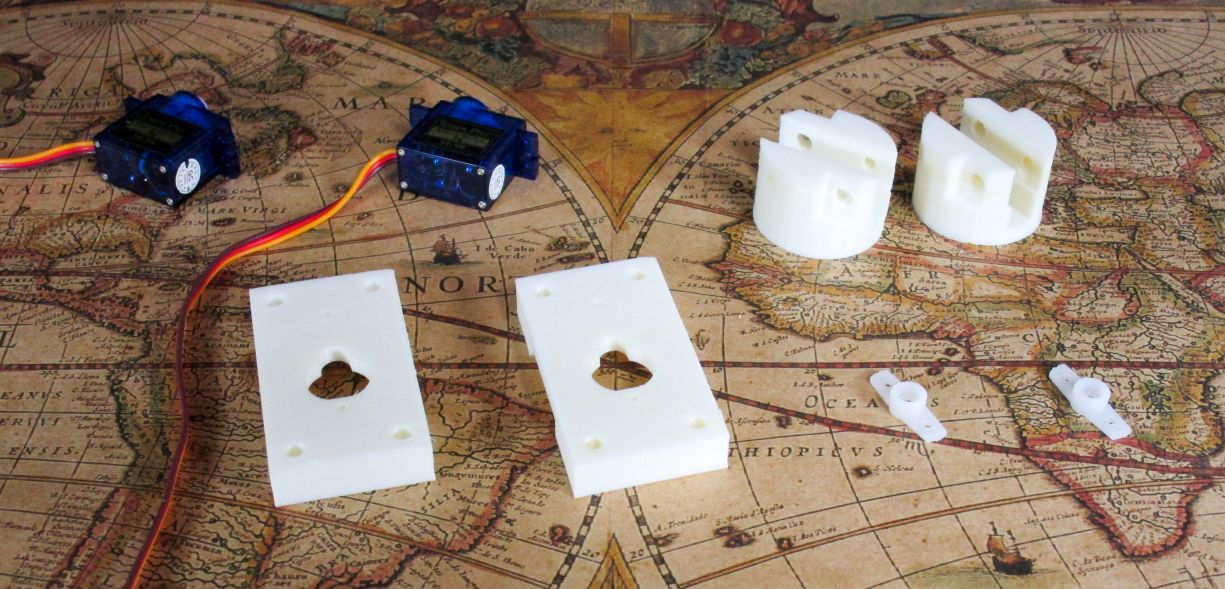
4. 組み立て
3Dプリンタで出力したパーツ一式です。
台座にサーボユニットを取り付けます。
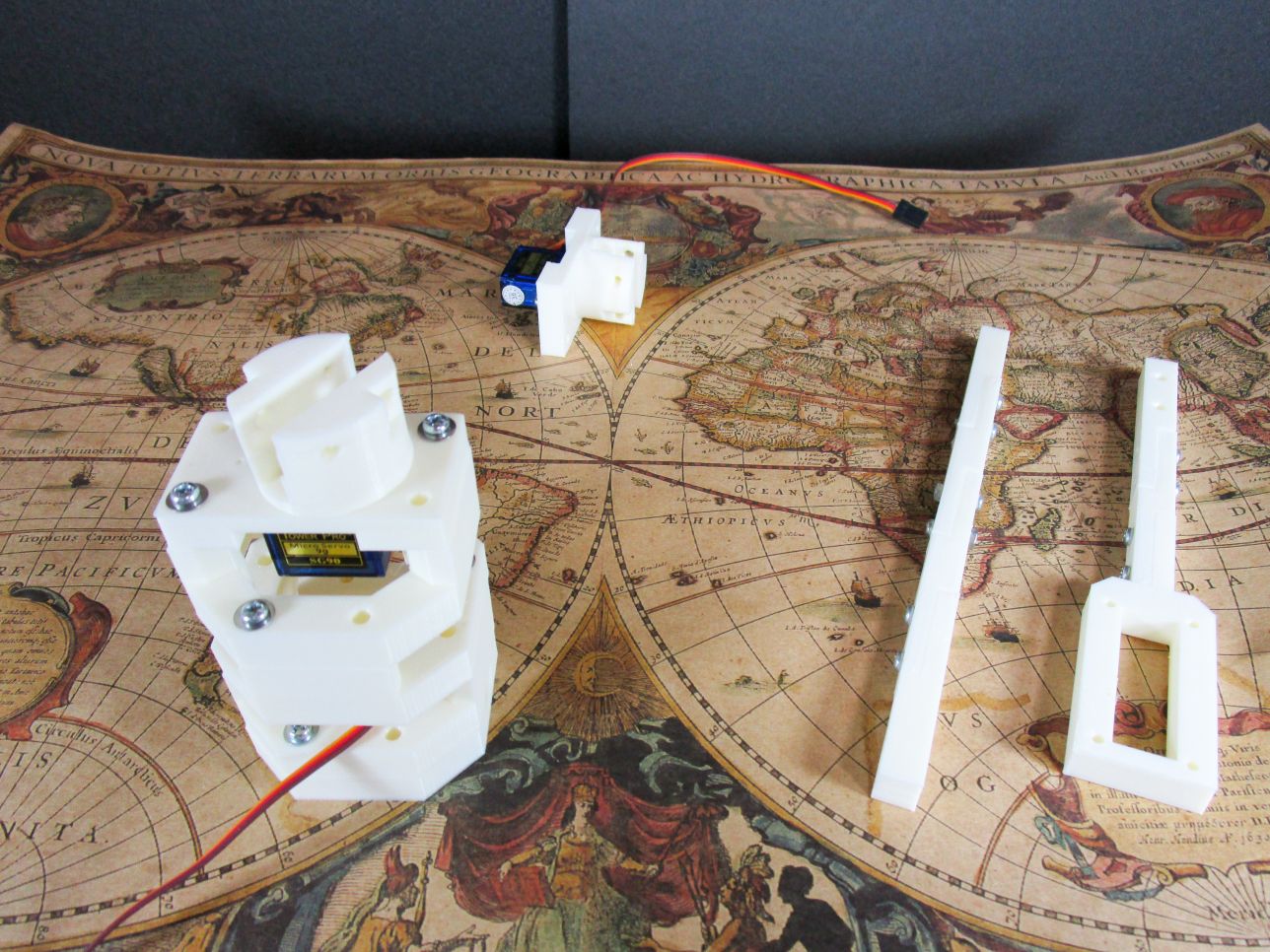
続いてアームのサーボユニットに取り付けます。

2個目のサーボユニットを残りのアームと組み合わせます。
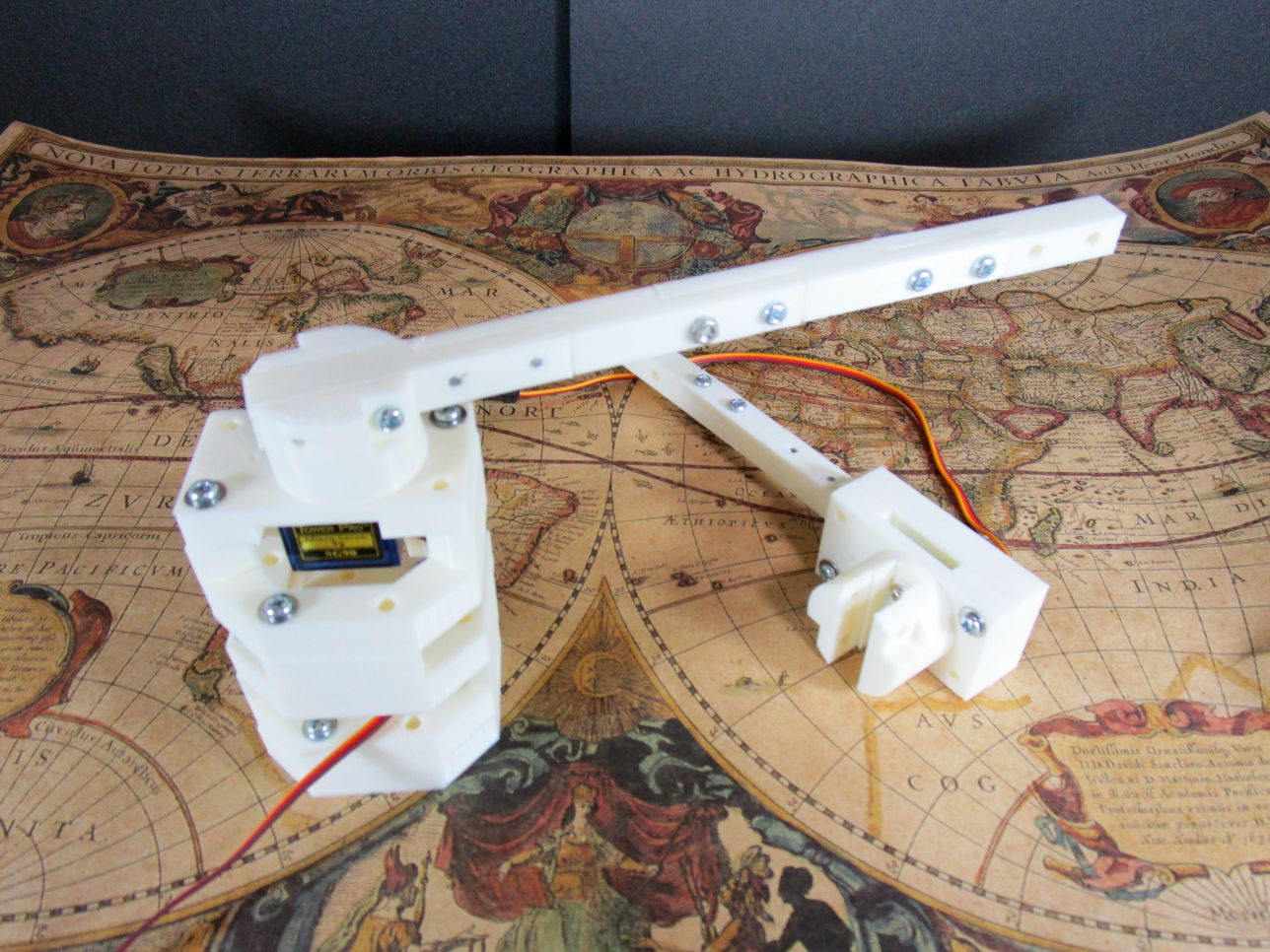
台座に取り付けてあるアームと2個目のアームを取り付けます。
4-1 熱収縮チューブについて
ケーブルをはんだ付けなどでつなげた際、他のケーブルや機器などとショートしないように絶縁体で覆う必要があります。ビニールテープでもいいのですが、もっと簡単で綺麗に覆うことができるアイテムがあります。それは熱収縮チューブです。
すぐ上の写真の右下の白とオレンジのケーブル接続部分と、赤と赤のケーブル接続部分で使用している黒いチューブが熱収縮チューブです。
熱収縮チューブとは熱すると縮む絶縁体のチューブです。ケーブルをつなげる前にチューブを通しておき、ケーブル接続後にチューブを接続部分に移動します。その後、はんだゴテなどを使用して熱します。するとチューブが縮み接続部分をしっかりと覆ってくれます。
以下に熱収縮チューブの使い方について説明しているサイトを紹介します。
「あると便利な熱収縮チューブ」
RSコンポーネンツでは収縮チューブが品揃えが豊富です。
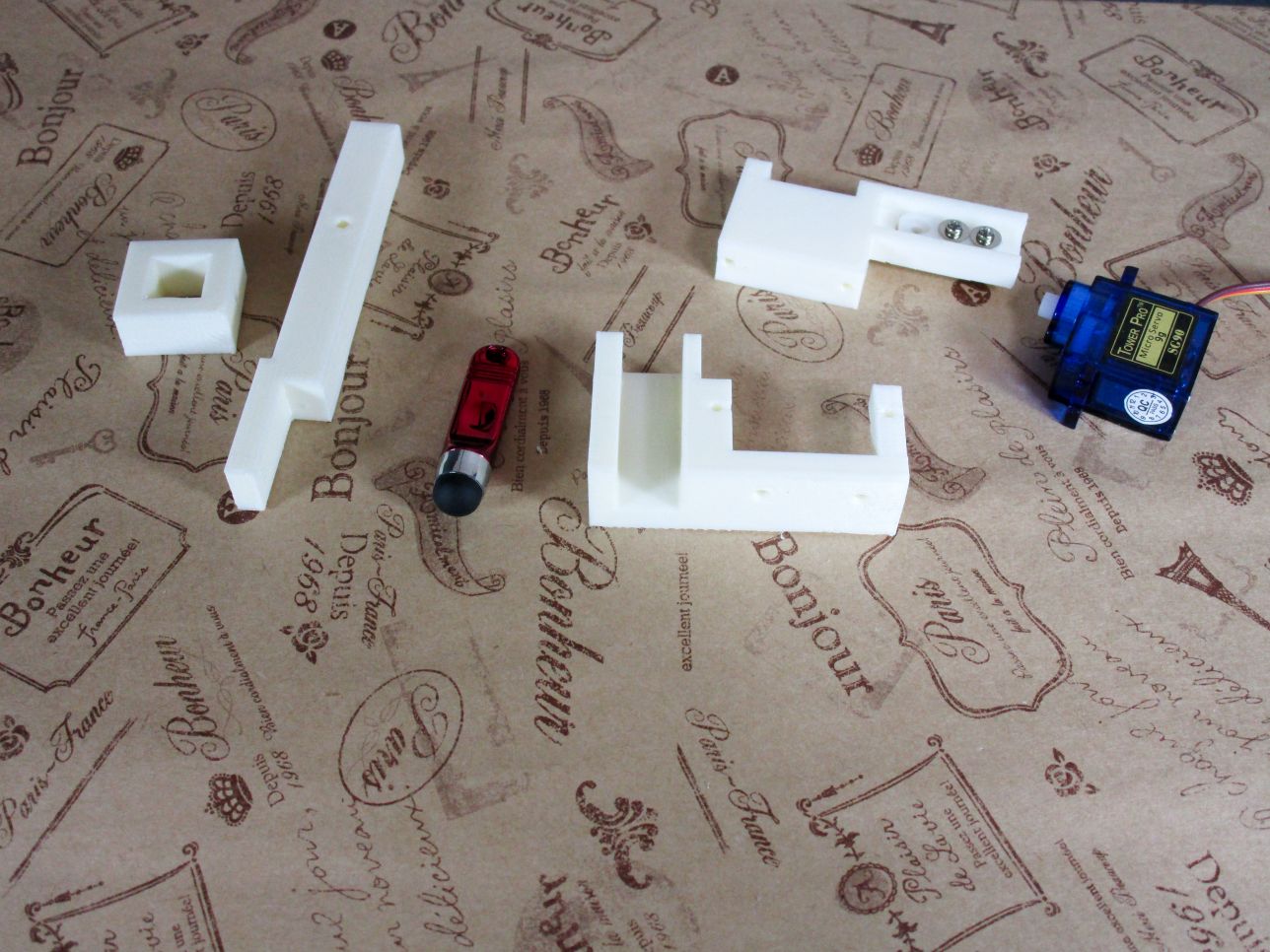
5. ロボットアームのタッチユニット
スマホやタブレットを実際に触る部分の作成です。タッチペンは100均で購入した物を使用します。ここでは回転運動を上下の運動に変換する必要があります。各パーツの写真です。
ラジコンサーボを取り付けます。
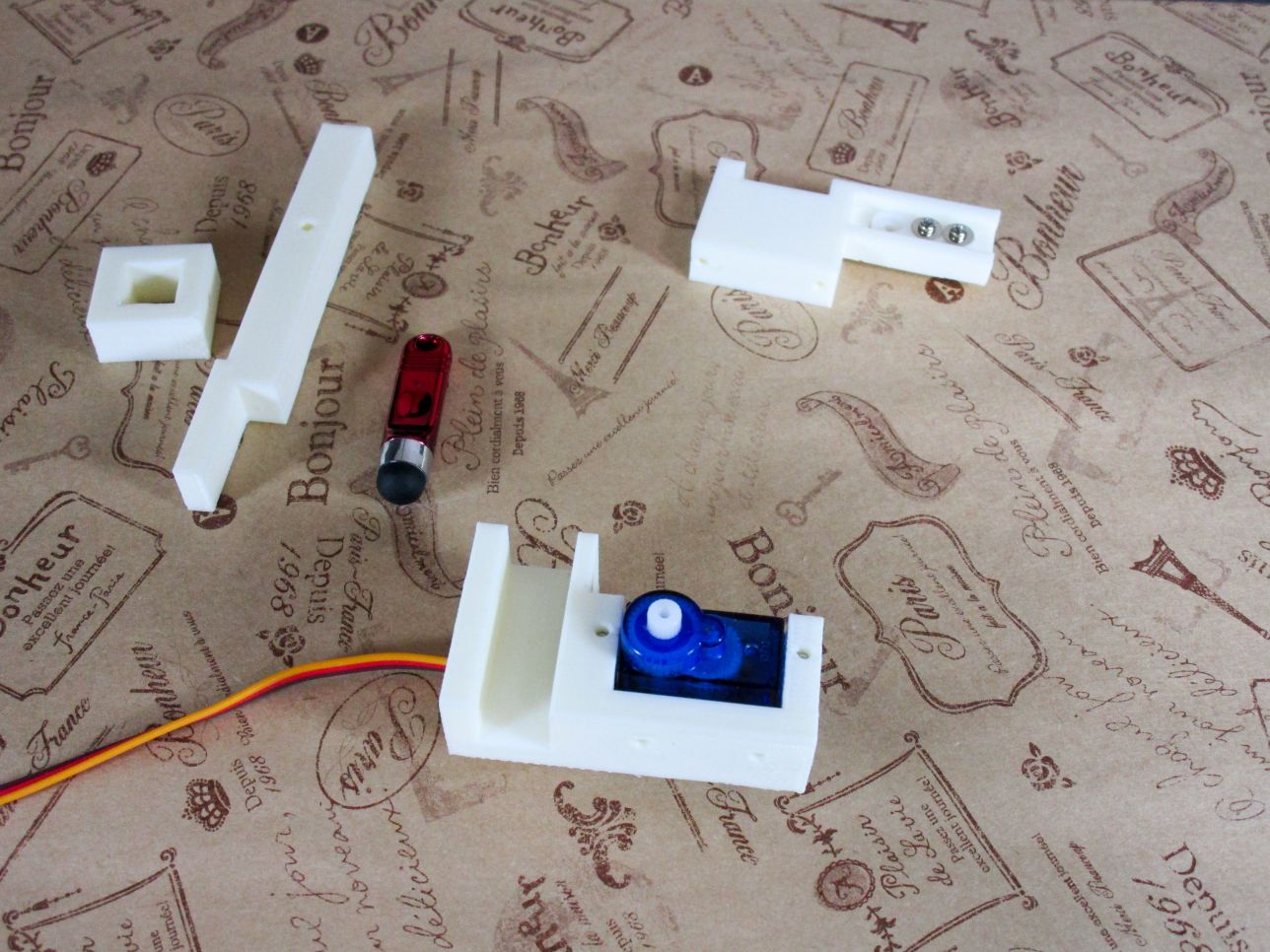
ラジコンサーボと動作を行う支柱を取り付けます。支柱にはネジが取り付けてあり、ラジコンサーボとつながっているパーツの上にのっています。そのネジの上を輪ゴムで押さえています。

完成です。ラジコンサーボが下に力を加えると、支柱に着いたネジを輪ゴムが押し、支柱が下がります。もし強く押し過ぎたとしても、輪ゴムにより破損するほどの力は加わらないようになっています。

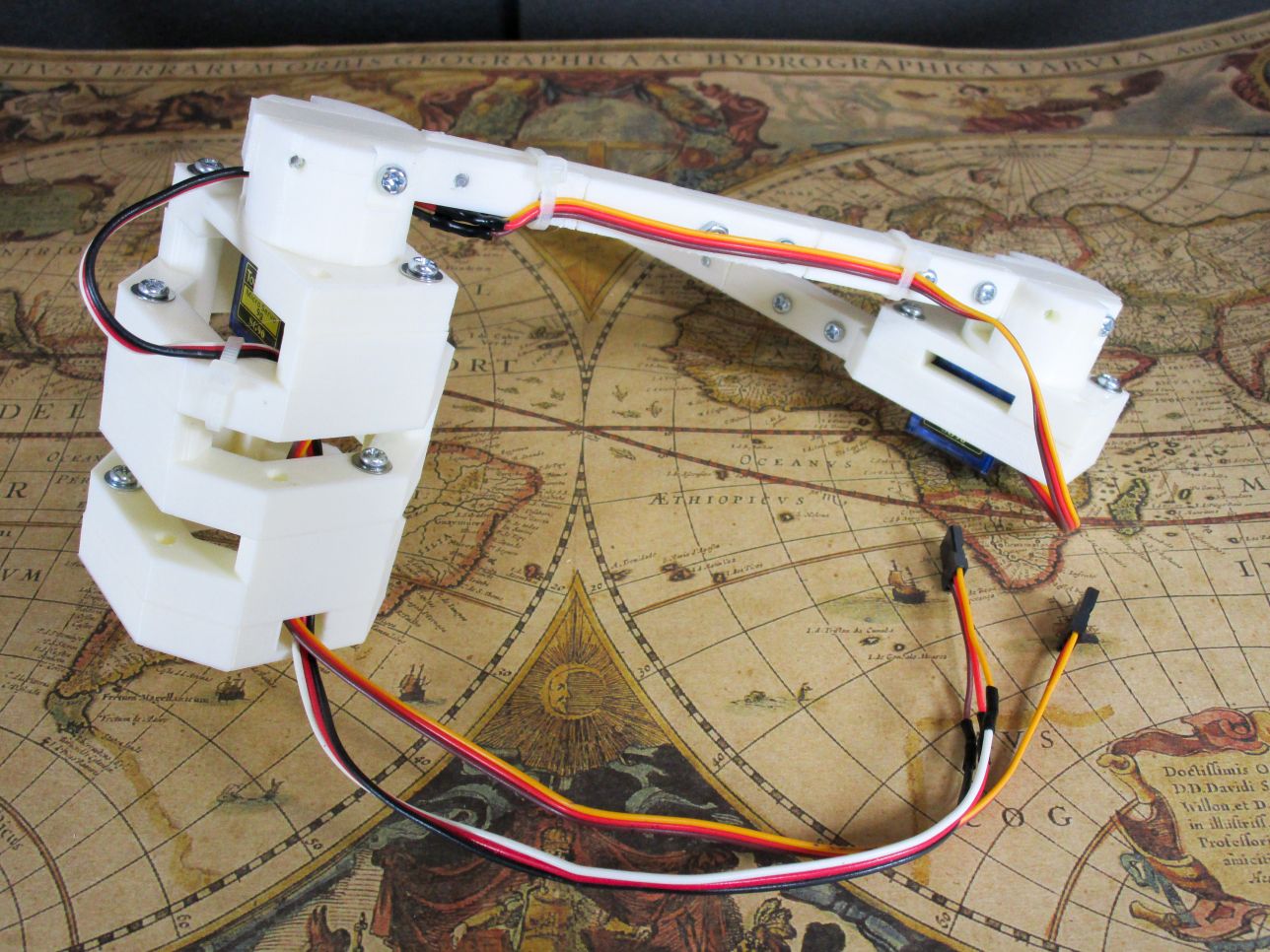
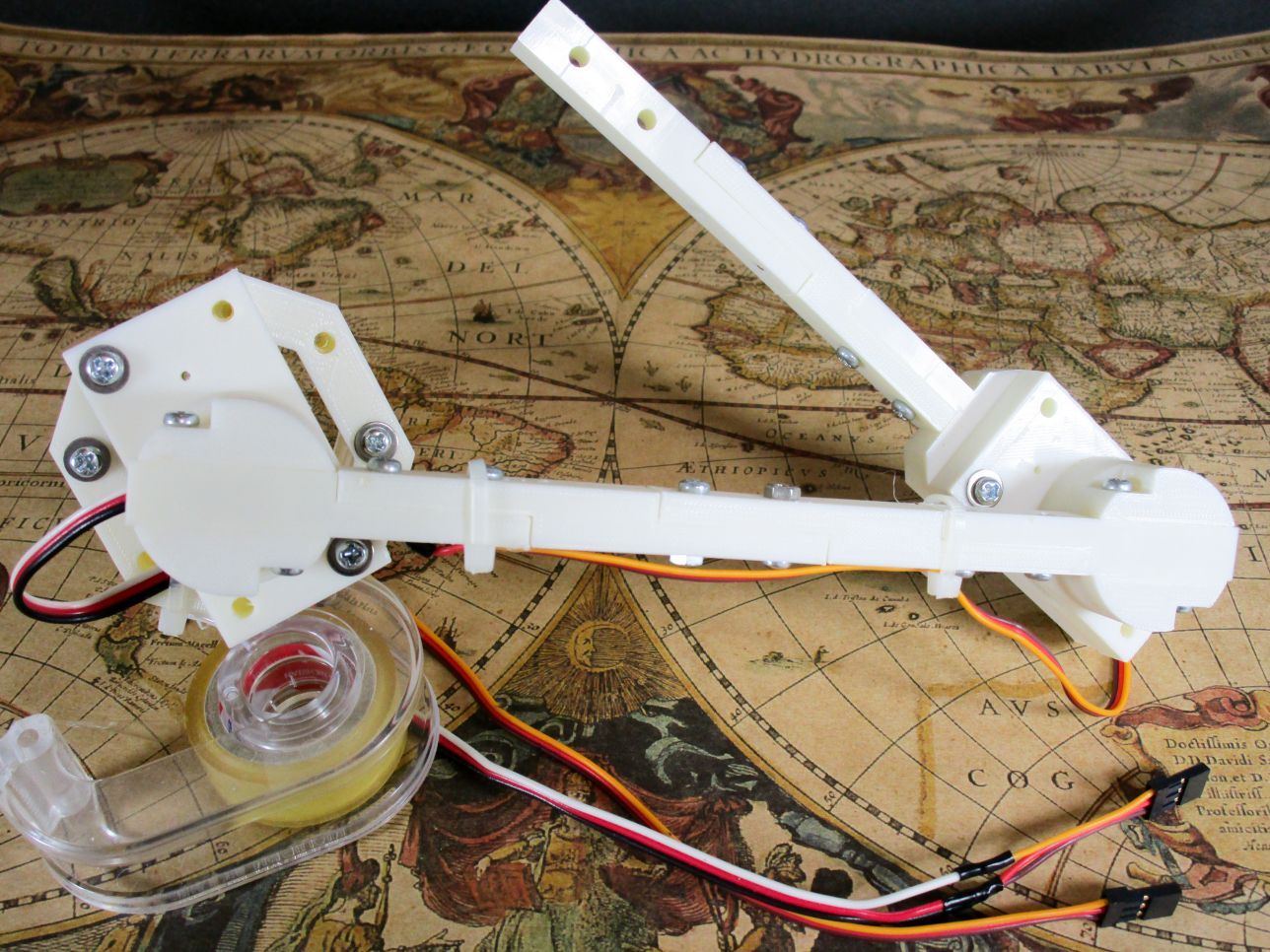
6. 違うロボットアーム
二人で作成しているため、大体の構造とパーツは同じなのですが、売っている物や持っている工具が違うため、同じものを作ることができませんでした。ということで、私が作成した機構の写真です。ほとんどを3Dプリンタの力に頼っています。
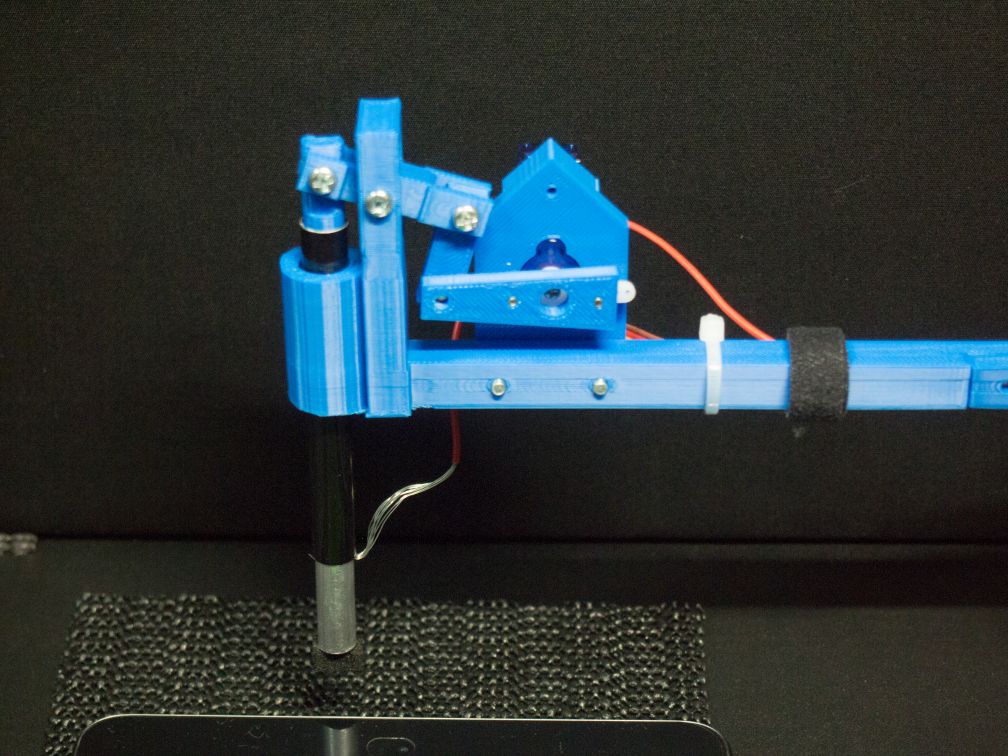
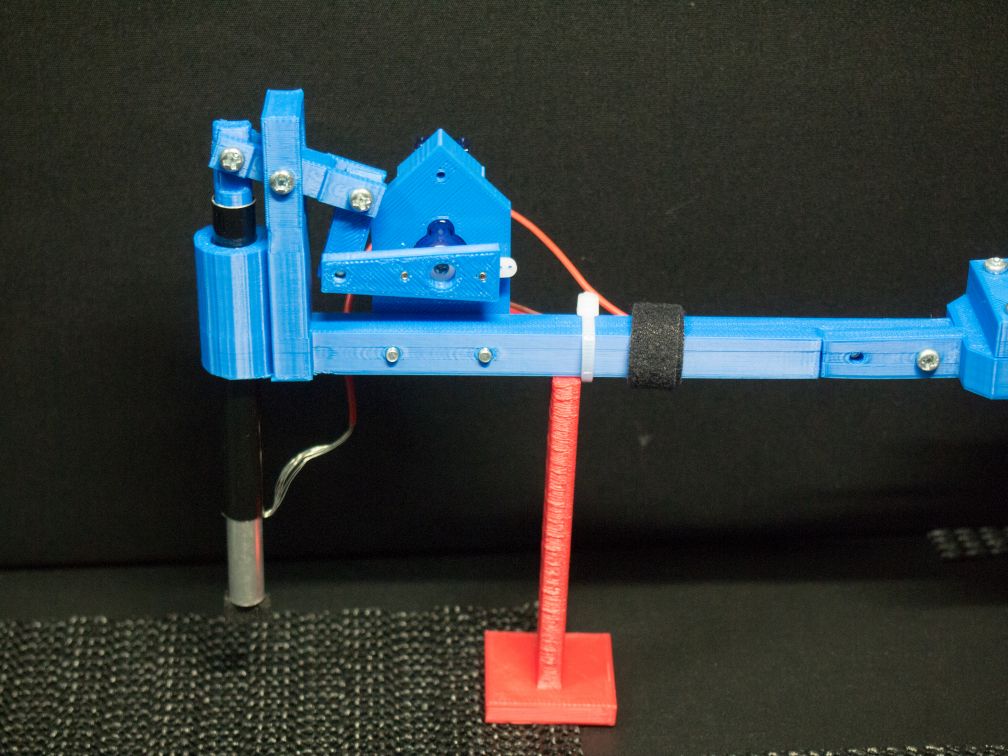
ちょっと複雑な感じですが、単なるリンク機構です。ラジコンサーボが動くとシーソーのようにもう片方が下に下がります。
ついでにロボットアームの腕置きも作っておきました。
3Dプリンタがあると色々なものを比較的簡単に作れるのがとても便利です。Shadeで作成データを作成するのは、なかなか面倒なところではありますが、データが出来上がると実物が出力されるのは非常に面白いです。ちなみに出力にかかる時間は、おおよそですが1つのパーツが1時間くらいです。
<更新履歴>
| 版 | 更新日 | 説明 |
| 新規作成 | 2015年10月1日 | 新規作成 |