Shadeでデザインし、3Dプリンタで出力し、組み立てが完了したので、実際に動かしたいと思います。
1. いきなりトラブル!!
完成したロボットアームの動作確認を行います。問題がなければ良かったのですが、ここで大きな問題が発生しました。電源を入れるとロボットアームが激しく振動します。目的地を行ったり来たりしてしまい停止しません。
どうやら目的地へ移動する際、遠心力などにより通り越してしまい、戻ろうとするがまた通り越してしまう。ということを繰り返してしまっているようです。また、2つのラジコンサーボが動くので、余計振動が大きくなってしまうようです。
今回のロボットアームにはエンコーダを取り付けていないため、現在地や現在速度を取得することができません。もしデータを取得することができれば制御も可能なのですが、今回は難しいです。そこで力技で止めてしまうことにしました。遠心力などで通り越してしまうのであれば、遠心力などの力を打ち消す力をどこかにつければ何とかなるかな、ということで回転部分の動きを悪くすることにしました。摩擦で止める・・・本当に力技ですね。その加工を行ったのが以下の写真です。

3Dプリンタで出力したパーツのベース面(底面)は、平らで滑らかでよく滑ります。そこで、滑りを悪くするために家具などを滑らせるシールを貼りました。底面よりも少し摩擦が大きくなります。
ちなみに私が作成した時、振動問題は発生しませんでした。多分、パーツの取り付けを行う際、強めに止めたからだと思います。作成者の組み立て方により変わるようです。
2. ラジコンサーボの調整
本来組み立て終ってからする作業ではないのですが、ここでラジコンサーボを制御するために必要なデータを取得します。それはラジコンサーボへ出力する信号の確認です。最小値と最大値を調べます。そこで以前作成した「ラジコンサーボチェッカー」を使用して調べます。
3. ロボットアームを動かす
さあ、いよいよロボットアームを動かす時が来ました。最初は電源を入れただけで振動が発生し、動かすことができませんでしたが、今回は電源を入れてもきちっと止まっています。
パソコンで目的地へ移動するための各ラジコンサーボの角度を計算します。続いて、PICへ移動するように命令を送信します。今回、ロボットアームを制御するために作成したパソコンのアプリです。
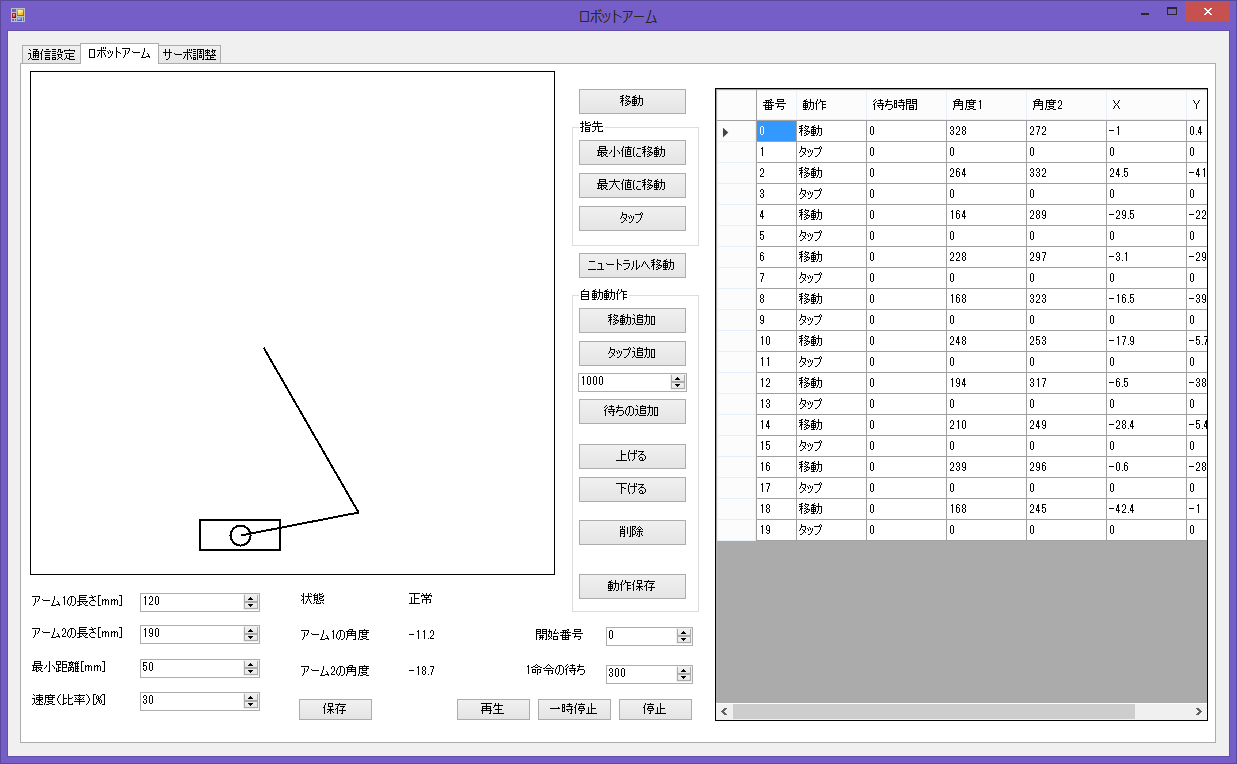
左側の画面をタップするとその位置を目的地とした角度を計算します。右側は自動で連続動作を行いたい場合に使用します。
4. 移動テスト動画
動画には以下の通りです。
- 振動して制御ができないとき
- 正常に移動したとき(低速移動)
- 正常に移動したとき(高速移動)
<更新履歴>
| 版 | 更新日 | 説明 |
| 新規作成 | 2015年10月2日 | 新規作成 |